- Inicio
- Productos
- Soluciones
- Sala de Noticias
- Servicios
- Nosotros
- Contacto
- Agente
- ES
Productos
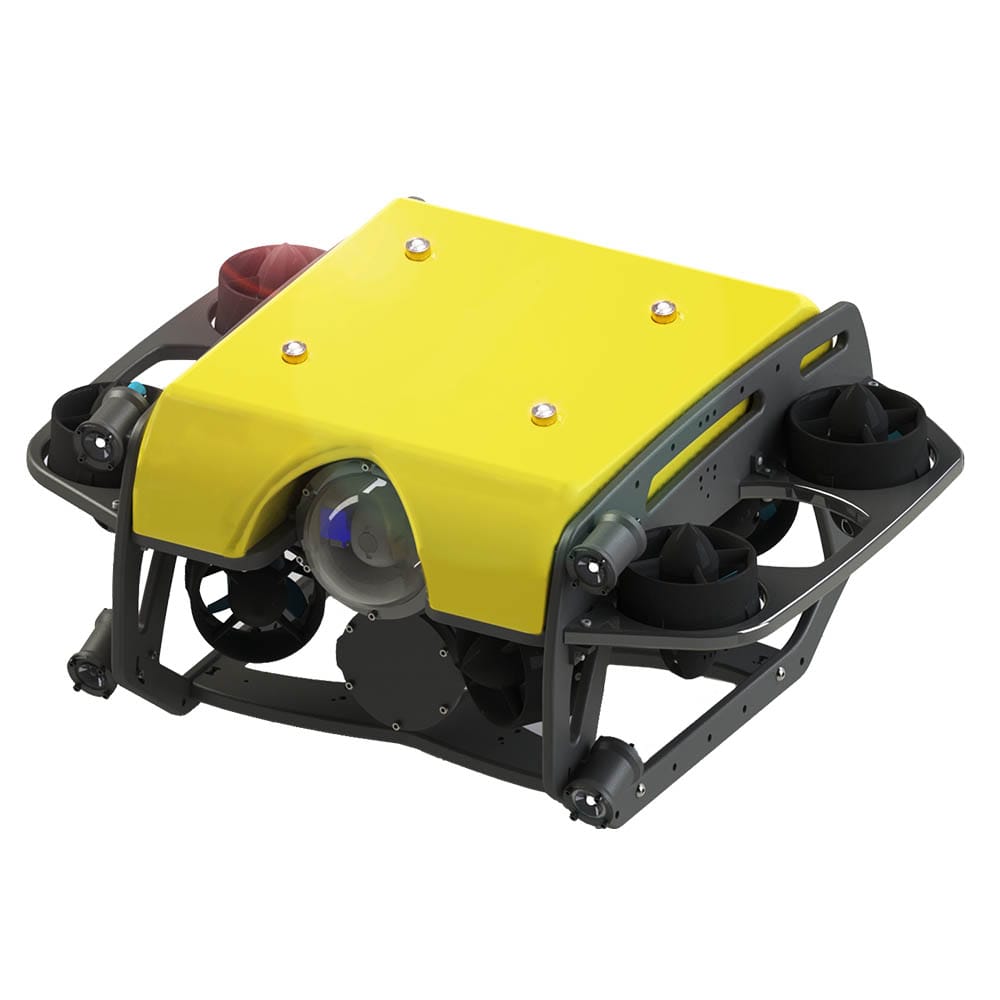
ND-UR002 Vehículo Operado Remotamente
Descripción General
El ND-UR002 Vehículo Operado Remotamente es alimentado por batería de litio, y equipado con más de seis propulsores completamente sellados y libres de mantenimiento, llenos de aceite, que pueden realizar movimientos flexibles y libres bajo el agua. Este vehículo submarino teledirigido está equipado con iluminación, cámara y otros componentes para proporcionar imágenes de vídeo y datos en tiempo real a los operadores de la parte seca.
Con un diseño modular, el ND-UR002 Vehículo Operado Remotamente / Vehículo Submarino Operado Remotamente puede ser flexiblemente equipado con pan-tilt submarino, sonar de evasión de obstáculos, sonar de imagen, brazo robótico (función simple y doble), etc. de acuerdo a los requerimientos específicos, para facilitar varias tareas submarinas.
Nuestro vehículo operado remotamente / vehículo submarino operado remotamente / vehículo submarino operado remotamente en venta proporciona un medio excelente para explorar el entorno submarino, realizar observaciones y llevar a cabo patrullas. Con precios competitivos, nuestros vehículos submarinos teledirigidos en venta garantizan que las tareas subacuáticas puedan llevarse a cabo con facilidad y gran eficacia.
Características
- Flexible y Móvil
Equipado con más de 6 propulsores, el empuje es más potente, se puede lograr la traslación y la rotación en cualquier dirección - Fácil de Usar
Los propulsores sumergidos en aceite están totalmente sellados y no requieren mantenimiento, lo que reduce en gran medida los costos de mantenimiento. - Gran Extensibilidad
Capaz de equiparse con una variedad de unidades funcionales según los requisitos para completar diversas tareas subacuáticas. - Ligero y Portátil
Con solo 18 kg, es ligero y portátil, fácil de desplegar y retirar, y perfecto para aplicaciones prácticas.
Especificaciones
| Vehículo Submarino | |
| Dimensiones | 460 x 350 x 260mm (L x A x A) |
| Profundidad máxima de inmersión | ≥300m |
| Velocidad | ≥1.5m/s |
| Propulsores | ≥6 (empuje del propulsor único: ≥5,8kgf, capacidad de carga vertical: ≥6kg) |
| Iluminación | 2 luces LED (iluminancia: ≥4000Lux, 6 brillos ajustables) |
| PTZ Camera x 1 | Integrado, servoángulo: ±60°, resolución: ≥1080P, gran angular: ≥110°, píxel efectivo: ≥200W |
| Sensores | Sensor de actitud de 9 ejes, sensor de profundidad, brújula electrónica, sensor de temperatura |
| Temperatura de trabajo | -20℃ ~ 65℃ |
| Peso (en el aire) | ≤18kg |
| Parámetros visualizados en el terminal | Vídeo, fecha, hora, profundidad del agua, velocidad, rumbo, temperatura, actitud ángulo de guiñada, ángulo de cabeceo, modo de movimiento, LED, potencia del equipo, etc. |
| Depósito de la batería | Con interruptor de inicio de turno, puerto de carga externo integrado, batería de litio de alto rendimiento extraíble, tiempo de trabajo: ≥3 horas |
| Brazo Robótico Submarino | |
| Dimensiones | Diámetro exterior máximo: ≤45mm; Longitud: ≥300mm |
| Peso | ≥0.5kg |
| Articulación en garra | Rango de sujeción: ≥90mm; Fuerza de sujeción máxima: ≥150N |
| Junta giratoria | Par nominal: ≥3N·m; Rango de rotación: 360° |
| Estación Terrestre | |
| Dimensiones | ≤520 x 430 x 230mm (L x A x A) |
| Pantalla de visualización | Tamaño: ≥19 pulgadas (colorido); Brillo: ≥1000cd/m² |
| Configuración del host | Procesador i5, ≥8 GB de memoria, 512 GB de disco duro. |
| Interfaz | USB x 2, comunicación ROV x 1, interfaz de carga x 1 |
| Sistema | Sistema Windows 10 LTSC, pantalla azul del sistema con un solo clic función de recuperación, compatible con el software de control ROV |
| Módulo de visualización de potencia | Sí |
| Palanca | Distancia de la palanca de mando hacia adelante y hacia atrás y la palanca latente: ≥240mm; Longitud de la palanca: ≥45mm |
| Funciones | Se integra con el botón de la cámara, el botón de control de profundidad, el botón de control de navegación, la palanca de control de giro e inclinación de la cámara, la palanca de control del acelerador y la palanca de control de la luz. |