- Home
- Products
- Solutions
- Newsroom
- Support
- About Us
- Contact Us
- Reseller
- Scope
- EN
PRODUCTS

{kind=link}
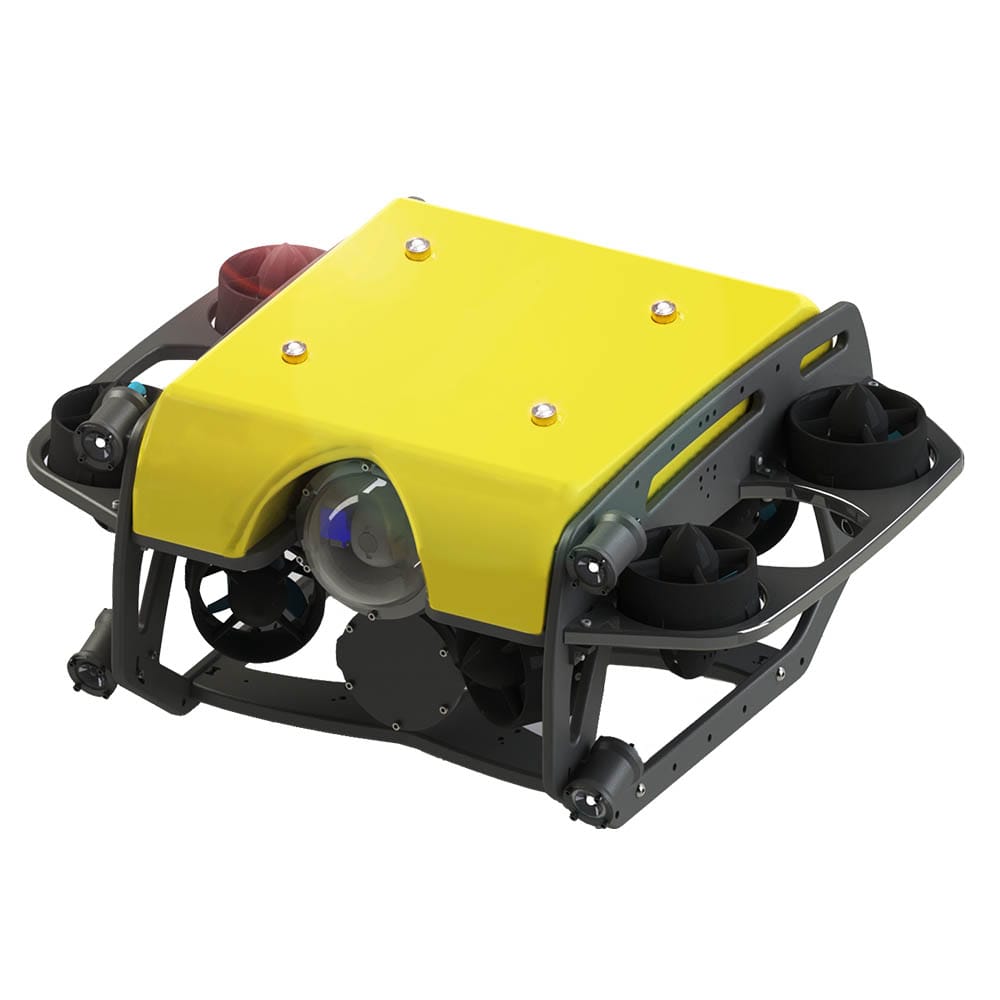
ND-UR002 Remotely Operated Vehicle
Overview
ND-UR002 Remotely Operated Vehicle is powered by lithium battery, and equipped with more than six fully sealed maintenance-free oil-filled thrusters, which can realize flexible and free movement underwater. This remotely operated underwater vehicle is equipped with lighting, camera and other components to provide real-time video images and data for the operators of the dry end.
With modular design, ND-UR002 remotely operated underwater vehicle for sale can be flexibly equipped with underwater pan-tilt, obstacle avoidance sonar, image sonar, robotic arm (single and dual function), etc. according to the specific requirements, to facilitate various underwater tasks.
Our remote operated vehicle provides an excellent means for exploring the underwater environment, conducting observations, and carrying out patrols. With competitive pricing, our remotely operated underwater vehicles for sale ensure underwater tasks can be accomplished with ease and high efficiency.
Features
- Flexible and Mobile
Equipped with more than 6 thrusters, the thrust is more powerful, translation and rotation in any direction can be achieved. - Easy to Use
The oil-filled thrusters of this remote underwater vehicle are fully sealed and maintenance-free, which greatly reduces the maintenance cost. - Strong Extensibility
Able to be equipped with a variety of functional units according to the requirements to complete various underwater tasks. - Lightweight and Portable
Only 18kg, this underwater vehicle for sale is light and portable, easy to deploy and withdraw, and perfectly fits for practical applications.
Specifications
| Underwater Vehicle | |
| Dimensions | 460 x 350 x 260mm (L x W x H) |
| Maximum dive depth | ≥300m |
| Speed | ≥1.5m/s |
| Thrusters | ≥6 (single thruster thrust: ≥5.8kgf, vertical load capacity: ≥6kg) |
| Lighting | 2 LED lights (illuminance: ≥4000Lux, 6 adjustable brightness) |
| PTZ Camera x 1 | Built-in, servo angle: ±60°, resolution: ≥1080P, wide angle: ≥110°, effective pixel: ≥200W |
| Sensors | 9 axis attitude sensor, depth sensor, electronic compass, temperature sensor |
| Working temperature | -20℃-65℃ |
| Weight (in air) | ≤18kg |
| Parameters displayed in terminal | Video, date, time, water depth, speed, heading, temperature, attitude yaw angle, pitch angle, motion mode, LED, equipment power, etc. |
| Battery tank | With shift start switch, integrated external charging port, removable high-performance lithium battery, working time: ≥3 hours |
| Underwater Robotic Arm | |
| Dimensions | Maximum outer diameter: ≤45mm; Length: ≥300mm; |
| Weight | ≥0.5kg |
| Claw joint | Clamping range: ≥90mm; Maximum clamping force: ≥150N |
| Rotating joint | Rated torque: ≥3N·m; Rotation range: 360° |
| Ground Station | |
| Dimensions | ≤520 x 430 x 230mm (L x W x H) |
| Display screen | Size: ≥19 inches (colorful); Brightness: ≥1000cd/m² |
| Host configuration | i5 processor, ≥8GB memory, 512 GB hard disk |
| Interface | USB x 2, ROV communication x 1, charging interface x 1 |
| System | Windows 10 LTSC system, system blue screen with one-click recovery function, supporting ROV control software |
| Power display module | Yes |
| Joystick | Distance of the forward and backward joystick and the latent joystick: ≥240mm; Length of the joystick: ≥45mm |
| Functions | Integrating with camera button, depth control button, navigation control button, camera pan-tilt control lever, throttle control lever and light control lever |